What it is¶
Where precision fuses with robotic mastery.
The Robot Control System, abbreviated as RoCS, is an advanced software framework designed for precise management and control of robots. It is the upper computer of the whole Fourier robot software system which includes both upper computer and lower computer.
RoCS empowers robots with exceptional control and functionality. Here's a brief overview:
Features¶
- High Precision Control: RoCS excels in various tasks, be it in industrial automation, medical surgery, or other domains, thanks to its precise control of robotic systems.
- Layered Architecture: It employs a modular architecture, making maintenance and scalability a breeze. This simplifies development and integration, enhancing system maintainability.
- User-Friendly Interface: RoCS provides a user-friendly graphical interface (Control App) that expedites the development process, allowing developers to interact with and monitor robotic systems seamlessly.
- Open Source: Part of RoCS (Client SDK) is open source, fostering community engagement and driving innovation by offering flexibility and customization opportunities.
- Efficient Data Transmission: RoCS's Server API ensures efficient and secure data transfer through HTTP and WebSocket protocols, crucial for real-time control and monitoring.
- Comprehensive Functionality: RoCS offers a wide range of functionalities, including sound and video processing, motion algorithms, hardware control, and more, making it suitable for diverse robotic application domains.
- Integration: RoCS effectively integrates various components within its layered structure, making it a comprehensive robotic control system capable of meeting diverse application needs.
RoCS Architecture¶
The RoCS architecture offers precise control and management of robotic systems through network-based communication, connecting the terminal with the three layers of the system.
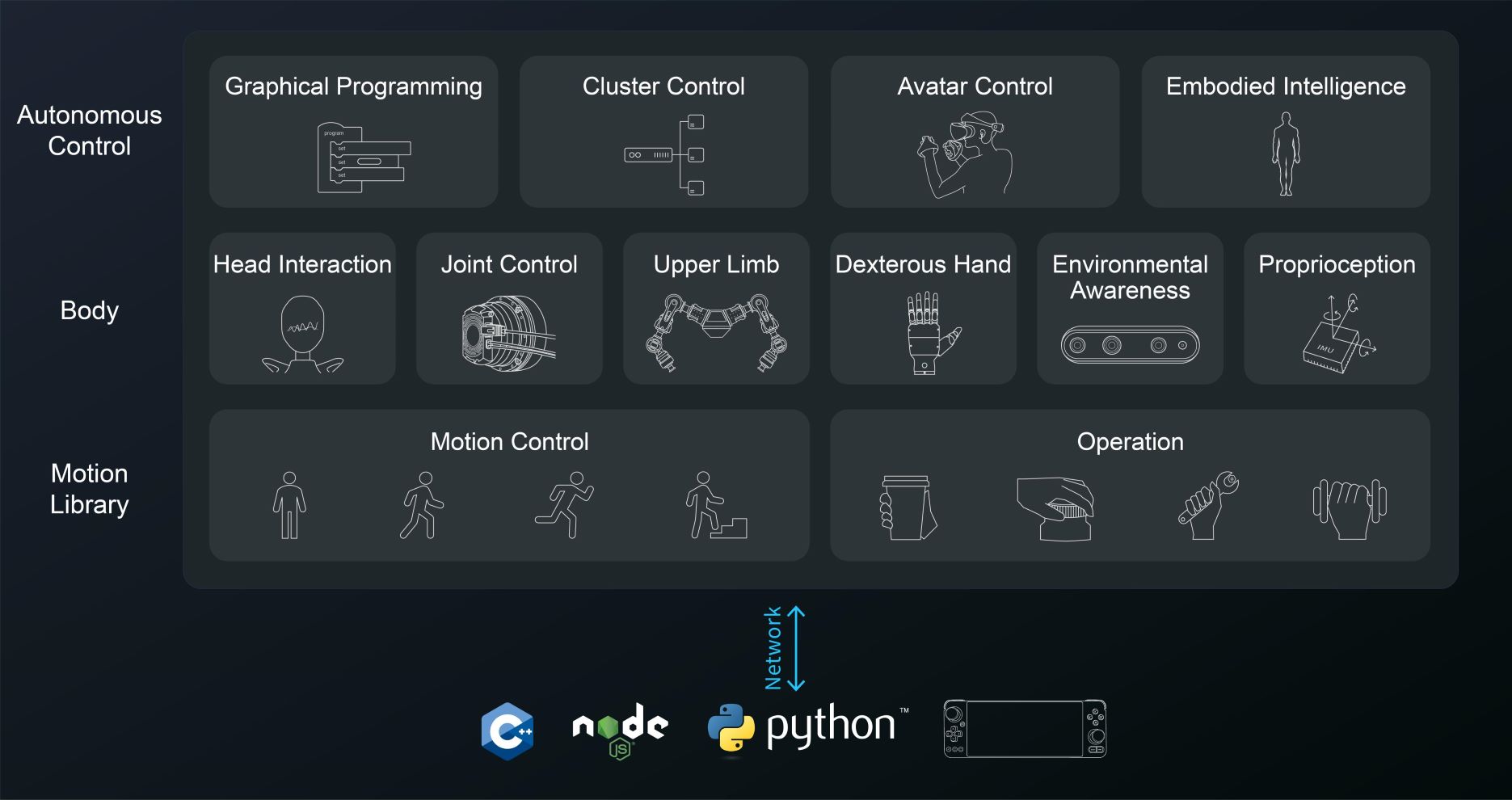
Bottom Layer - Motion Library
- The Motion Library, at the bottom layer, handles core functions related to motion control and operational control.
- It encompasses motor control, motion algorithms, and operational control, ensuring precise and coordinated robot movements.
Middle Layer - Body
- The middle layer, known as the Body, represents the physical embodiment of the robot and is responsible for various aspects of its operation.
- Components for head interaction, joint control, upper limb dexterity, hand environmental awareness, and proprioception contribute to the robot's physical capabilities and sensory perception.
Upper Layer
- The uppermost layer is versatile and dynamic, incorporating advanced functionalities such as graphical programming, cluster control, avatar control, and embodied intelligence.
- This layer enables higher-level tasks, including human-robot interaction, decision-making, and intelligent behaviors.
Motion Library¶
The motion library of the RoCS serves as a repository of predefined motor skills and motions that a robot can perform, offering several key features:
- Database of Reusable Motor Behaviors: It acts as a comprehensive database housing a collection of motor behaviors and functions that can be readily utilized.
- Control Software Functions: The library includes software functions that enable the activation and control of these predefined motions.
- Diverse Motion Types: These motions encompass a wide range of actions, such as gestures, poses, gaits, grasping maneuvers, and calibrations.
- Categorized Organization: Typically, the library is organized into categories, grouping motions based on their application, such as arm motions, navigation, head movements, and more.
- Customization Flexibility: Engineers can mix and match these predefined motions as needed for specific robotic applications, thanks to parameterization, which allows for customization.
- Continuous Expansion: The library is dynamic, allowing for the continuous addition of new motions and motor skills as technology and requirements evolve.
- Streamlined Robot Control: Leveraging the motion library simplifies robot control by providing a library of established behaviors that can be easily accessed.
- Motion Planning and Optimization: Onboard motion planning algorithms can optimize and blend motions to ensure smooth and efficient execution.
- High-Level Control: By referencing desired motions from the library, high-level control of the robot becomes more straightforward and efficient.
The motion library serves as a valuable resource that offers a collection of reusable motor functions as building blocks for a wide range of robotic tasks. This approach eliminates the need for repetitive, low-level reprogramming of each behavior and streamlines the development of robotic applications.
Info
As of the current implementation, the Motion Library provides a set of predefined motions. Please be aware that the available motions are limited in scope. However, we are actively working on expanding the library to incorporate a broader range of motions and functionalities in future updates. Stay tuned for enhanced motion capabilities and increased flexibility in upcoming releases. Your understanding and patience are greatly appreciated as we continue to improve and enrich the Motion Library.