Mechanical System Introduction¶
The Fourier GR-1 General-purpose Humanoid Robot stands out as one of the rare domestic humanoid robots capable of achieving widespread commercial applications. With its remarkably true-to-life body structure and humanoid motion control, the GR-1 boasts an impressive range of motion, encompassing up to 44 degrees of freedom across its form, coupled with an impressive peak joint torque of 230 Nm. This innovative creation excels in swift walking capabilities, nimble obstacle avoidance, reliable uphill and downhill traversing, and formidable resistance to impact disruptions. These remarkable features collectively position it as an ideal foundation for advancing general artificial intelligence.
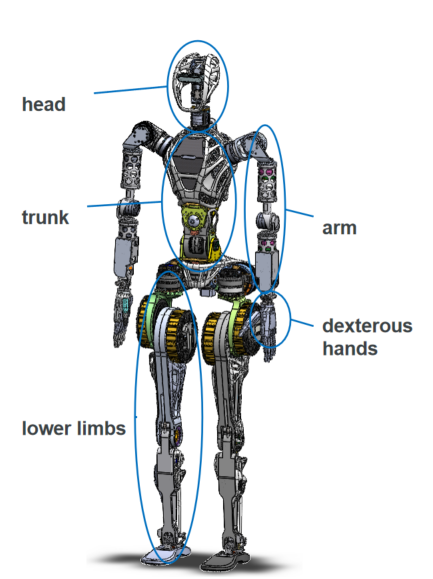
There are five major components, including head, trunk, arm, dexterous hands and lower limbs.
Head¶
Equipped with dual-depth cameras to provide vision for the robot, the head can achieve three degrees of freedom motion.
Dimensions: 262X122X156mm

Trunk¶
Trunk includes the chest, back, and waist. The chest contains the main control board and computing unit, the back houses the battery pack, and the waist can achieve three degrees of freedom motion.
Dimensions: 262X122X156mm

Arm¶
Arm includes the shoulder joint, elbow joint, and wrist joint. The shoulder joint has three degrees of freedom: flexion-extension, adduction-abduction, and internal-external rotation. The elbow joint has one degree of freedom: flexion-extension. The wrist joint has three degrees of freedom: internal-external rotation, radial-ulnar deviation, and palmar flexion-dorsiflexion. Among these, radial-ulnar deviation and palmar flexion-dorsiflexion are achieved through a two-degree-of-freedom parallel structure.
Dimensions: 730X200X158mm

Dexterous Hands¶
The dexterous hand is an advanced robotic end-effector designed to mimic the flexibility and precision of a human hand. It features six degrees of freedom (DOF), each representing an independent mode of movement, allowing it to perform a variety of complex tasks.
The six degrees of freedom of the dexterous hand include thumb abduction and adduction, and thumb rotation. Additionally, the index finger, middle finger, ring finger, and pinky finger each have one degree of freedom, which is flexion and extension. The thumb's two degrees of freedom enable it to achieve opposition and adjust its position flexibly, enhancing grasping and manipulation capabilities. The independent flexion and extension of the other four fingers allow them to adapt to and control objects of various shapes and sizes, improving overall grasp stability and strength.

Lower Limbs¶
It includes the hip joint, knee joint, and ankle joint. The hip joint has three degrees of freedom: adduction-abduction, internal-external rotation, and flexion-extension. The knee joint has one degree of freedom: flexion-extension. The ankle joint achieves two degrees of freedom, dorsiflexion-plantarflexion, and inversion-eversion through a parallel structure.
Dimensions: 950X393X303mm
