Calibration Procedure¶
If the upper limb posture appears abnormal or if the motors have been replaced, you should perform zero calibration. The calibration procedure is as follows:
- Turn off the robot actuators and the embedded robot computer.
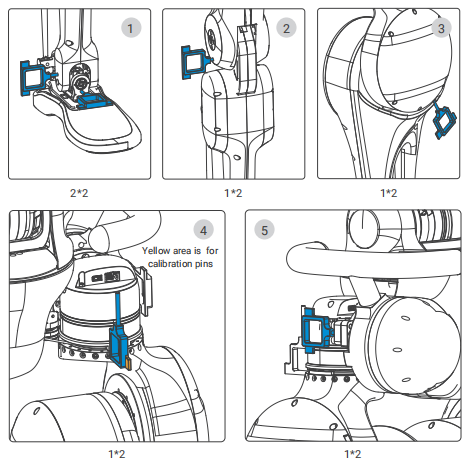
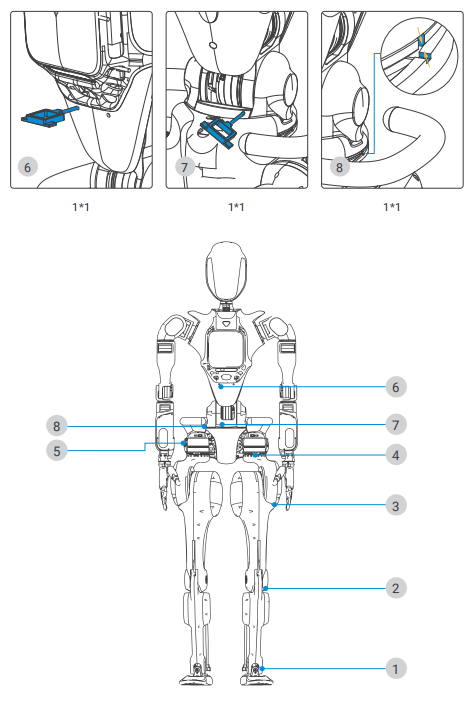
- Insert the calibration tool into the robot's lower limbs and waist joint pinholes. There are
6*2zero-position pinholes in the lower limbs and3*1zero-position pinholes in the waist.
- Connect the embedded robot computer to a monitor through the extension dock. Plug in a keyboard and a mouse into the extension dock as well.
-
Release the Emergency Stop switch and power on the embedded robot computer. The login password is
fftai2015. -
Open a terminal and do the following:
Run the following command:
```powershell
cd ~/Documents/server_app/bin/pythonscripts/
python3 abs_run.py
```
Success
If prompted with get abs angle complete!, it indicates getting absolute angle successfully.
Run the following commands:
```powershell
python3 checkabsjson.py
python3 setmotorzeropos.py
```
Success
If prompted with Set Motor Zero Position Success, it signifies successful zero-point setting.
- Shut down the embedded robot computer.
- Press down the Emergency Stop switch.
- Remove the calibration tools. Ensure that all calibration tools have been removed before proceeding with other operations.